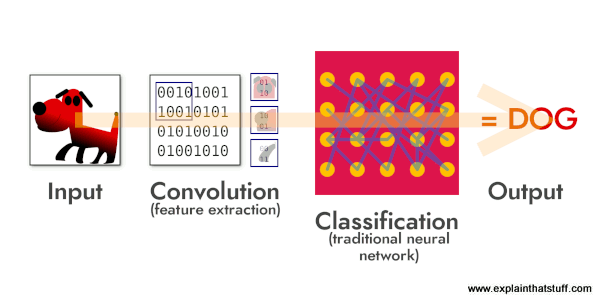
In this notebook, we will train a simple Convolutional Neural Network (CNN) on the CIFAR-10 dataset. CIFAR-10 is composed of 60,000 32x32 color images in 10 classes (such as airplane, car, bird, cat, etc.). You can imagine an IoT device (like a Raspberry Pi + camera) capturing images and either classifying them on the device itself (edge computing) or sending them to the cloud for classification. This small-scale example demonstrates how a CNN learns to recognize different objects in images.
1. Imports and Dataset Loading
We start by importing the necessary libraries and loading the CIFAR-10 dataset from Keras.
import tensorflow as tf
from tensorflow.keras import datasets, layers, models
import matplotlib.pyplot as plt
import numpy as np
# Load CIFAR-10 dataset
(x_train, y_train), (x_test, y_test) = datasets.cifar10.load_data()
# Normalize pixel values
x_train = x_train.astype('float32') / 255.0
x_test = x_test.astype('float32') / 255.0
print("Training data shape:", x_train.shape)
print("Testing data shape:", x_test.shape)
2. Visualizing the Data
Let's quickly look at a few samples from the dataset to get a feel for the images we're dealing with.
class_names = ["airplane","automobile","bird","cat","deer",
"dog","frog","horse","ship","truck"]
# Show first 5 images
fig, axes = plt.subplots(1, 5, figsize=(10, 2))
for i in range(5):
axes[i].imshow(x_train[i])
label = y_train[i][0] # because y_train[i] is [label]
axes[i].set_title(class_names[label])
axes[i].axis('off')
plt.show()
3. Building the CNN Model
We will construct a simple CNN with two convolutional layers, followed by pooling layers, and finally some fully connected layers to perform classification.
model = models.Sequential()
# First convolutional block
model.add(layers.Conv2D(filters=32, kernel_size=(3, 3), activation='relu', input_shape=(32, 32, 3)))
model.add(layers.MaxPooling2D(pool_size=(2, 2)))
# Second convolutional block
model.add(layers.Conv2D(filters=64, kernel_size=(3, 3), activation='relu'))
model.add(layers.MaxPooling2D(pool_size=(2, 2)))
# Flatten the feature maps
model.add(layers.Flatten())
# Fully connected layers
model.add(layers.Dense(64, activation='relu'))
model.add(layers.Dense(10, activation='softmax')) # 10 classes in CIFAR-10
model.summary()
4. Compiling and Training the Model
We choose categorical_crossentropy as our loss function and adam as our optimizer, then train for a few epochs.
model.compile(optimizer='adam',
loss='sparse_categorical_crossentropy',
metrics=['accuracy'])
history = model.fit(x_train, y_train, epochs=5,
validation_data=(x_test, y_test),
batch_size=64)
5. Evaluating the Model
We evaluate how well the CNN performs on the test set.
test_loss, test_acc = model.evaluate(x_test, y_test, verbose=2)
print(f"Test accuracy: {test_acc:.2f}")
6. Making Predictions
Let's check a few predictions on test images. In an IoT context, these images might come from a remote camera, and the model could classify them on the edge device or via a cloud service.
predictions = model.predict(x_test[:5])
predicted_labels = np.argmax(predictions, axis=1)
fig, axes = plt.subplots(1, 5, figsize=(10, 2))
for i in range(5):
axes[i].imshow(x_test[i])
axes[i].set_title("Pred: " + class_names[predicted_labels[i]])
axes[i].axis('off')
plt.show()
7. Summary and IoT Integration
Our CNN can classify CIFAR-10 images with a certain level of accuracy after just a few epochs. In an IoT scenario, similar models could be deployed on small devices like a Raspberry Pi (e.g., using TensorFlow Lite) or used in the cloud for real-time image classification. This example demonstrates how convolutional layers extract features from images, and how pooling layers reduce spatial size while keeping the most important information.
Ideas for IoT Integration:
- Convert this model to TensorFlow Lite to run on edge devices with limited resources.
- Use a camera-equipped device (Raspberry Pi or other SBC) to capture real-time images and classify them locally.
- Send the images or classification results to a remote server for centralized monitoring or logging.